

番茄采摘机器人
主要特点
- 番茄采摘机器人是融合多传感器技术,基于深度学习的视觉算法,引导机器人完成识别、定位、采摘、放置任务的高度协同自动化系统,识别和采摘成功率可达90%以上,可解决自然条件下的番茄选择性收获问题。番茄采摘机器人主要针对温室栽培的串收小番茄进行采摘,能实现机器人自动导航,地面与轨道切换运行,识别成熟番茄以及果梗,机械臂自动路径规划,末端执行器自动剪切夹持,采摘后自动装篮等功能。


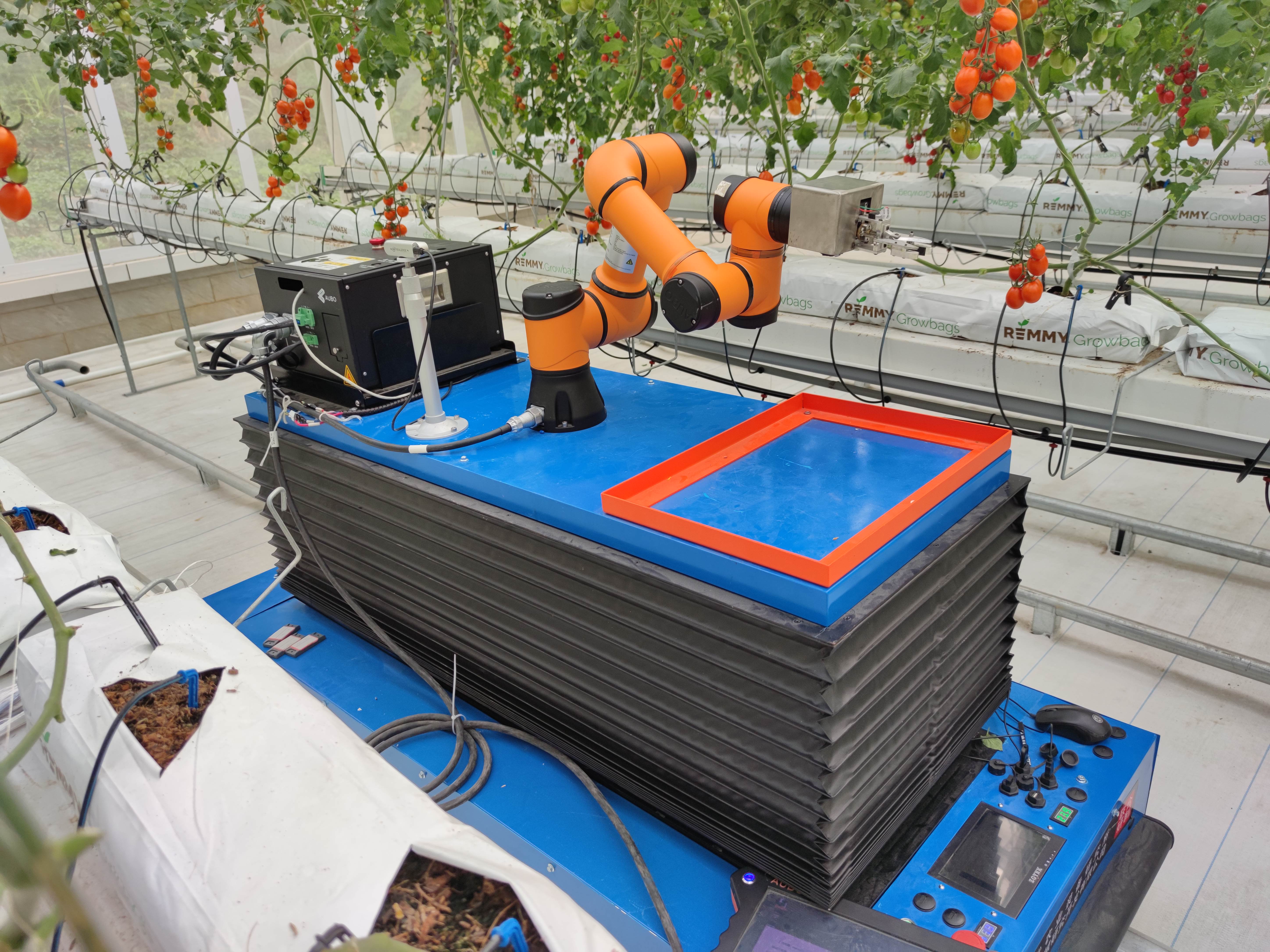
1、基于采摘点识别定位的番茄串采摘机器人,该机器人能够沿预设轨道自主移动,在移动的同时主动识别定位成熟的番茄串并实施夹剪一体的采摘动作。 2、番茄采摘机器人包括7自由度机械臂、末端执行器、深度相机、可运行深度学习算法的控制器、移动平台等五个部分 3、通过运用深度学习算法并分析番茄串生长特性,在复杂环境下可快速准确识别成熟番茄和对应的果梗;通过深度信息分割算法、形态学操作、k-means聚类算法和细化算法的综合分割算法,实现近色背景下精确识别采摘点。 4、移动平台为自研轨道地面两用底盘,可分别在地面和轨道上行进,采用工业级麦克拉姆轮,可实现原地转向,转向平稳;基于地磁线进行自动导航,按照既定线路实现自动上轨下轨换行等动作。 5、具有机械臂升降机构以及果筐升降机构,可根据番茄的高度调整机械臂位置,可调整升降范围为2m,可适应多种种植环境。
- 充电电压
- 220V
- 供电系统
- DC48V
- 双目相机
- 像素3840×1080,30FPS
- 机械臂
- 7轴机械臂,定位精度为±0.1mm
- 识别率
- 97%
- 单位采摘速度
- ≤15s/串
- 识别速度
- 0.18s/张
- 最长持续工作时间
- 8h
- 行走机构
- 四轮差速,工业级麦克拉姆轮
- 控制方式
- 手动及自动控制相结合
 服务热线
服务热线- 丘陵山地农业装备020-32073193
- 设施农业装备020-38481125
- 农产品加工装备020-38481399
- 畜牧工程装备020-38481320
- 资源与环境工程装备020-38481356
- 水产工程装备020-38481265
- 农业人工智能装备0755-82497620
- 农业信息技术020-38480582

Copyright © 粤ICP备15009265号 | 版权所有:乐动平台